
DETR网络模型构建
这篇文章主要为记录DETR模型的构建过程
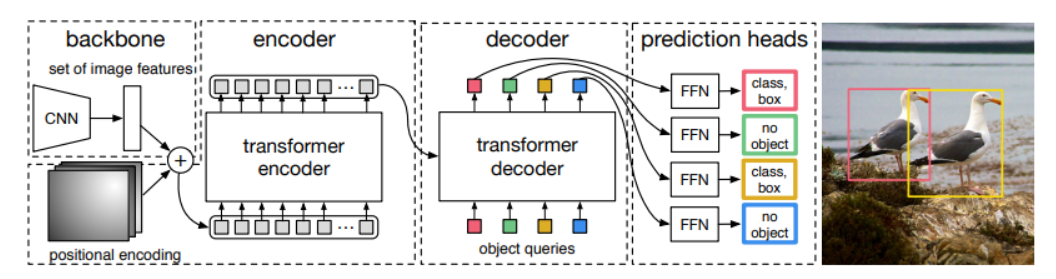
首先明确DETR模型的搭建顺序:首先是backbone的搭建,使用的是resnet50,随后是Transformer模型的构建,包含编码器的构建与解码器的构建,完成后则是整个DETR模型的构建
构建代码在detr.py文件中
# 搭建主干网络backbone = build_backbone(args)# 搭建transfoemertransformer = build_transformer(args)# 搭建DETR模型model = DETR(backbone,transformer,num_classes=num_classes,num_queries=args.num_queries,aux_loss=args.aux_loss,)
我们来沿着这个代码逐步了解其构造
骨干网络构建
进入 backbone.py 的 build_backbone() 方法
def build_backbone(args):#搭建位置编码器position_embedding = build_position_encoding(args)#args.lr_backbone默认为1e-5,则train_backbone默认为true,通过设置backbone的lr来设置是否训练网络时# 接收backbone的梯度从而让backbone也训练。train_backbone = args.lr_backbone > 0#是否需要记录backbone的每层输出return_interm_layers = args.masks#构建骨干网络 args.backbone默认为resnet50,args.dilatyion默认为false。backbone = Backbone(args.backbone, train_backbone, return_interm_layers, args.dilation)# 将backbone和位置编码器集合在一起放在一个model里model = Joiner(backbone, position_embedding)# 设置model的输出通道数model.num_channels = backbone.num_channelsreturn model
位置编码器构建
首先是位置编码器构造,进入position_encoding.py文件(注意位置编码最后是加上去的,故其前后维度不会发生变化。
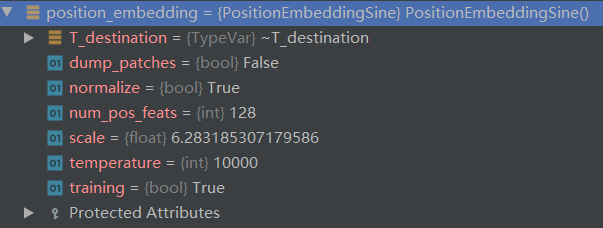
def build_position_encoding(args):#args.hidden_dim transformer的输入张量的channel数,位置编码和backbone的featuremap结合后需要输入到transformer中N_steps = args.hidden_dim // 2# 余弦编码方式,文章说采用正余弦函数,是根据归纳偏置和经验做出的选择if args.position_embedding in ('v2', 'sine'):# TODO find a better way of exposing other arguments#PositionEmbeddingSine(N_steps, normalize=True):正余弦编码方式,这种方式是将各个位置的各个维度映射到角度上,# 因此有个scale,默认是2pi。position_embedding = PositionEmbeddingSine(N_steps, normalize=True)# 可学习的编码方式elif args.position_embedding in ('v3', 'learned'):position_embedding = PositionEmbeddingLearned(N_steps)else:raise ValueError(f"not supported {args.position_embedding}")return position_embedding
返回的位置编码信息如下:
resnet50网络构建
随后使用pytorch的model库进行resnet50网络的构建
def __init__(self, name: str,train_backbone: bool,return_interm_layers: bool,dilation: bool):# getattr(obj,name)获取obj中命名为name的组成。可以理解为获取obj.name# 获取torchvision.models中实现的resnet50网络结构# replace_stride_with_dilation 决定是否使用膨胀卷积;pretrained 是否使用预训练模型;# norm_layer 使用FrozenBatchNorm2d归一化方式backbone = getattr(torchvision.models, name)(replace_stride_with_dilation=[False, False, dilation],pretrained=is_main_process(), norm_layer=FrozenBatchNorm2d)#获得resnet50网络结构,并设置输出channels为2048,所以我们的backbone的输出则是# (batch, 2048, H // 32,W // 32),在父类BackboneBase.__init__中进行初始化。num_channels = 512 if name in ('resnet18', 'resnet34') else 2048super().__init__(backbone, train_backbone, num_channels, return_interm_layers)
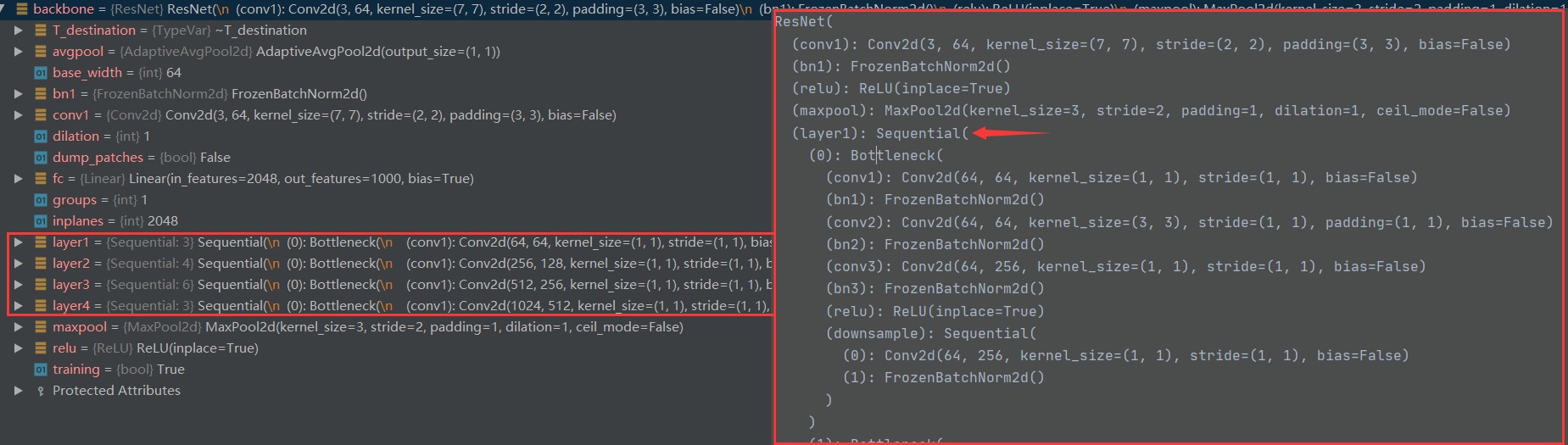
此时通过pytorch的model库获得的backbone为:其中已进行了相关参数的初始化
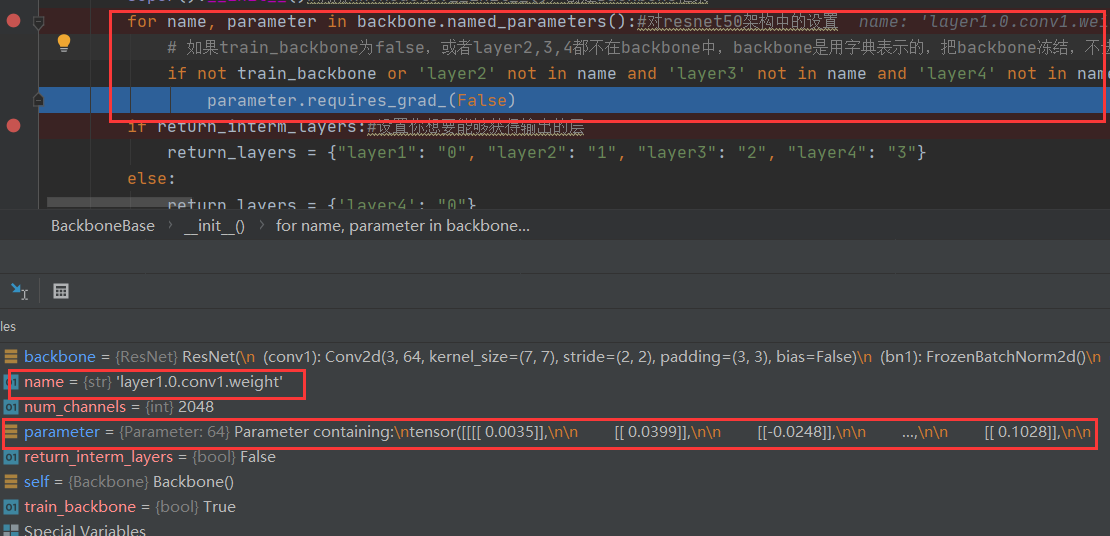
在最后其进入其父类进行进一步设置,逐层设置是否进行梯度更新,其构建的resnet模型中已是预训练模型,有参数。
通过下图可以看到backbone的主要结构,通道数
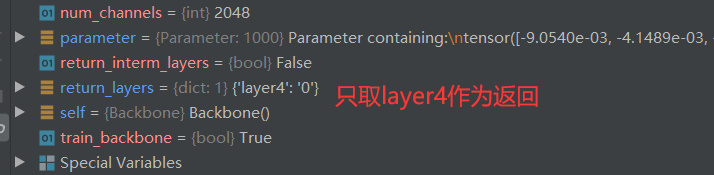
随后通过model = Joiner(backbone, position_embedding)将位置编码器与backbone构建到一个model中。并通过model.num_channels = backbone.num_channels设置新构成的model的通道数与backbone的通道数一致为2048。
Joiner构造后的结构如下:
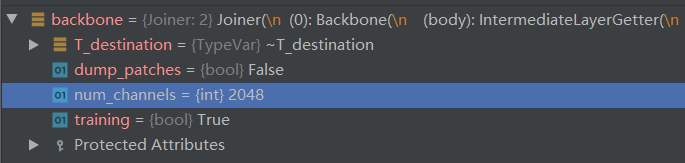
Joiner((0): Backbone((layer1): Sequential( )(layer2): Sequential( )(layer3): Sequential( )(layer4): Sequential( ))(1): PositionEmbeddingSine()
)
详细结构如下:
Joiner((0): Backbone((body): IntermediateLayerGetter((conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)(bn1): FrozenBatchNorm2d()(relu): ReLU(inplace=True)(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)(layer1): Sequential((0): Bottleneck((conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(1): FrozenBatchNorm2d()))(1): Bottleneck((conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(2): Bottleneck((conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)))(layer2): Sequential((0): Bottleneck((conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): FrozenBatchNorm2d()))(1): Bottleneck((conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(2): Bottleneck((conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(3): Bottleneck((conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)))(layer3): Sequential((0): Bottleneck((conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): FrozenBatchNorm2d()))(1): Bottleneck((conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(2): Bottleneck((conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(3): Bottleneck((conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(4): Bottleneck((conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(5): Bottleneck((conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)))(layer4): Sequential((0): Bottleneck((conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): FrozenBatchNorm2d()))(1): Bottleneck((conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True))(2): Bottleneck((conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): FrozenBatchNorm2d()(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): FrozenBatchNorm2d()(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): FrozenBatchNorm2d()(relu): ReLU(inplace=True)))))(1): PositionEmbeddingSine()
)
最终完成backbone的构建,随后则跳转回detr.py中继续transformer模型的构建
Transformer模型构建
跳转到 transformer.py 中执行 build_transformer() 方法
def build_transformer(args):return Transformer(d_model=args.hidden_dim,dropout=args.dropout,nhead=args.nheads,dim_feedforward=args.dim_feedforward,num_encoder_layers=args.enc_layers,num_decoder_layers=args.dec_layers,normalize_before=args.pre_norm,return_intermediate_dec=True,)
其对应参数值为:
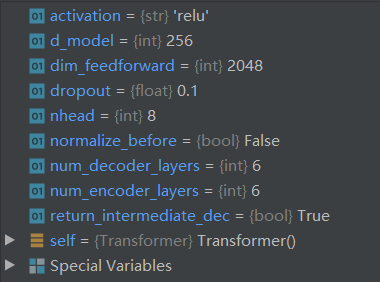
在Transformer模型的构建中,分别包含编码器层与解码器层的构建,而由上可知分别设计6层编码器与6层解码器,其结构都是相同的,只需要构造成一个随后再复制即可。
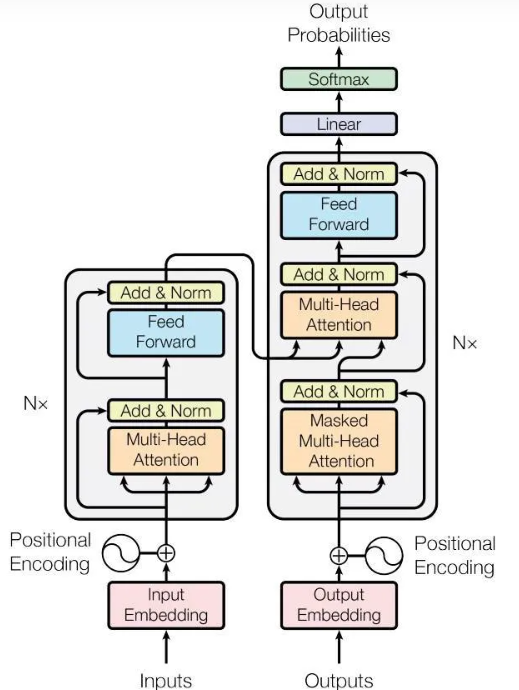
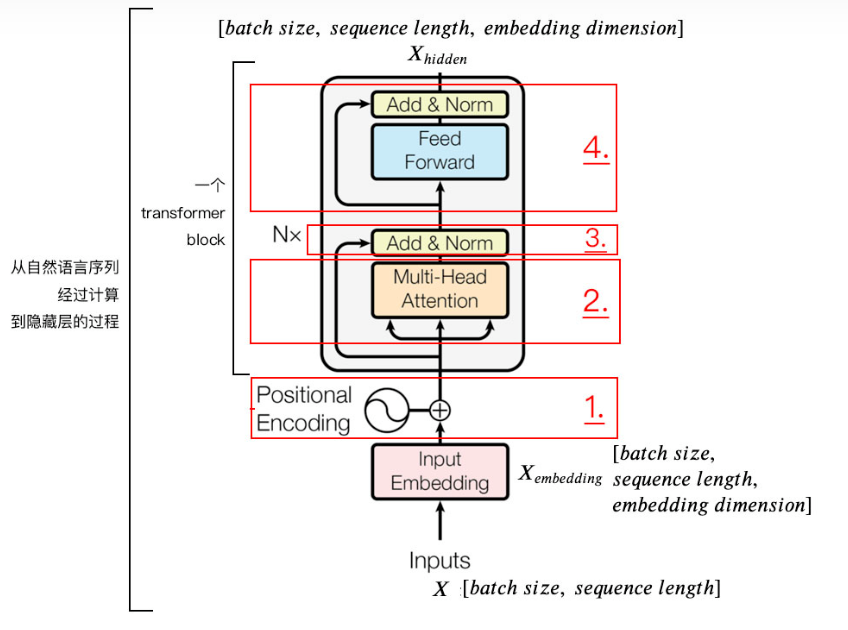
- 在第一层,transformer = embedding + 位置编码(Positional Encoding) + encoder +
decoder ; - 在第二层,encoder = 多个EncoderLayer = 多个(Multi-Head-Attention + LayerNorm
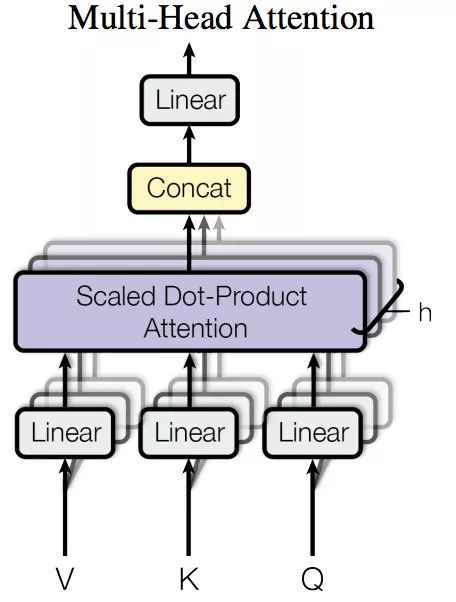
Residual连接 + FeedForwardNet);decoder = 多个DecoderLayer = 多个(Masked Multi-Head-Attention + encoder-decoder Multi-Head-Attention + LayerNorm + Residual连接 + FeedForwardNet)。其中,LayerNormalization和BatchNorm不同,BatchNorm是在一个batch里所有sample的同一个维度上计算mean std(均差与方差),而LayerNorm不考虑batch,是在一个sample的不同维度上计算mean std; - 在第三层,Multi-Head-Attention = linear + scaled dot-product attention(单头注意力) + concat + linear;
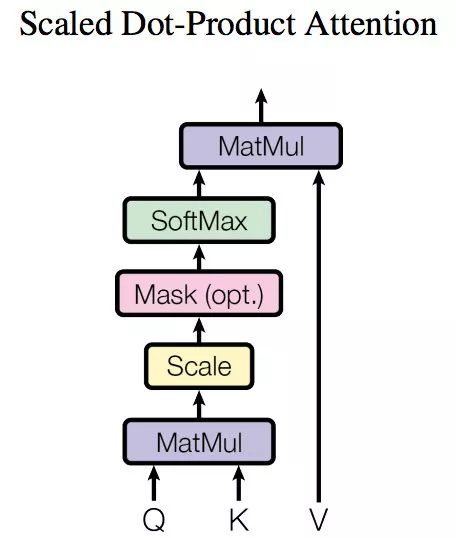
- 在第四层, scaled dot-product attention = MatMul + Scale + Mask + SoftMax+MatMul。
编码器层的构造
encoder_layer = TransformerEncoderLayer(d_model, nhead, dim_feedforward,dropout, activation, normalize_before)
多头注意力构建
编码器中最重要的便是多头注意力的构建了,使用的是pytorch中封装好的方法构建。
self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)
参数介绍
# 先决定参数
dims = 256 * 10 # 所有头总共需要的输入维度
heads = 10 # 单注意力头的总共个数
dropout_pro = 0.0 # 单注意力头 dropout_p: dropout的概率,当其为非零时执行dropout# 传入参数得到我们需要的多注意力头
layer = torch.nn.MultiheadAttention(embed_dim = dims, num_heads = heads, dropout = dropout_pro)
在这里,输入维度为256,可以理解为想要获得的特征维度为256,在内部计算时,由于有8个头,则会将其均分为256/8=32,随后在输出是会将其再拼接回256。
多头注意力已经在pytorch中封装好了,我们直接调用即可:
def __init__(self, embed_dim, num_heads, dropout=0., bias=True, add_bias_kv=False, add_zero_attn=False,kdim=None, vdim=None, batch_first=False, device=None, dtype=None) -> None:factory_kwargs = {'device': device, 'dtype': dtype}super(MultiheadAttention, self).__init__()self.embed_dim = embed_dimself.kdim = kdim if kdim is not None else embed_dimself.vdim = vdim if vdim is not None else embed_dimself._qkv_same_embed_dim = self.kdim == embed_dim and self.vdim == embed_dimself.num_heads = num_headsself.dropout = dropoutself.batch_first = batch_firstself.head_dim = embed_dim // num_headsassert self.head_dim * num_heads == self.embed_dim, "embed_dim must be divisible by num_heads"if not self._qkv_same_embed_dim:self.q_proj_weight = Parameter(torch.empty((embed_dim, embed_dim), **factory_kwargs))self.k_proj_weight = Parameter(torch.empty((embed_dim, self.kdim), **factory_kwargs))self.v_proj_weight = Parameter(torch.empty((embed_dim, self.vdim), **factory_kwargs))self.register_parameter('in_proj_weight', None)else:self.in_proj_weight = Parameter(torch.empty((3 * embed_dim, embed_dim), **factory_kwargs))self.register_parameter('q_proj_weight', None)self.register_parameter('k_proj_weight', None)self.register_parameter('v_proj_weight', None)if bias:self.in_proj_bias = Parameter(torch.empty(3 * embed_dim, **factory_kwargs))else:self.register_parameter('in_proj_bias', None)self.out_proj = NonDynamicallyQuantizableLinear(embed_dim, embed_dim, bias=bias, **factory_kwargs)if add_bias_kv:self.bias_k = Parameter(torch.empty((1, 1, embed_dim), **factory_kwargs))self.bias_v = Parameter(torch.empty((1, 1, embed_dim), **factory_kwargs))else:self.bias_k = self.bias_v = Noneself.add_zero_attn = add_zero_attnself._reset_parameters()
Q,K,V 等参数也是在此构造的,其维度也都为256。(注意按照源码来看,QKV可以存在维度不同的状态)
torch.empty是按照所给的形状形成对应的tensor,特点是填充的值还未初始化,类比torch.randn(标准正态分布),这就是一种初始化的方式。在PyTorch中,变量类型是tensor的话是无法修改值的,而Parameter()函数可以看作为一种类型转变函数,将不可改值的tensor转换为可训练可修改的模型参数,即与model.parameters绑定在一起,register_parameter的意思是是否将这个参数放到model.parameters,None的意思是没有这个参数。
随后进行权重值初始化,分别为Weights (2563,256),Bias为2563
这里实际上Weights是由Wq,Wk,Wv按序排列组合的,在进行运算时再分开。
多头注意力介绍
关于多头注意力机制,就是有多个单头注意力组成的,如下图单头注意力。
整体称为一个单注意力头,因为运算结束后只对每个输入产生一个输出结果,一般在网络中,输出可以被称为网络提取的特征,那我们肯定希望提取多种特征,[ 比如说我输入是一个修狗图片的向量序列,我肯定希望网络提取到特征有形状、颜色、纹理等等,所以单头注意肯定是不够的 ]
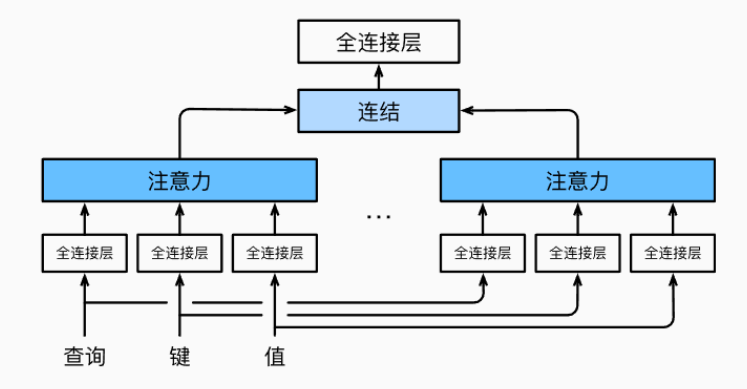
于是最简单的思路,最优雅的方式就是将多个头横向拼接在一起,每次运算我同时提到多个特征,所以多头的样子如下:
因为是拼接而成的,所以每个单注意力头其实是各自输出各自的,所以会得到h个特征,把h个特征拼接起来,就成为了多注意力的输出特征。
那么想要在训练的时候使用,我们就需要给它喂入数据,也就是调用forward函数,完成前向传播这一动作。
编码器其他组件构建
Positional Encoding
位置编码,按照字面意思理解就是给输入的位置做个标记,简单理解比如你就给一个字在句子中的位置编码1,2,3,4这样下去,高级点的比如作者用的正余弦函数

其中pos表示字在句子中的位置,i指的词向量的维度。经过位置编码,相当于能够得到一个和输入维度完全一致的编码数组 Xpos ,当它叠加到原来的词嵌入上得到新的词嵌入。

此时的维度为:一个批次的句子数 X 一个句子的词数 X 一个词的嵌入维度
Add & Norm
这里主要做了两个操作
一个是残差连接(或者叫做短路连接),说得直白点就是把上一层的输入 X 和上一层的输出 SubLayer(X) 加起来 ,即 X+SubLayer(X)
,举例说明,比如在注意力机制前后的残差连接:

一个是LayerNormalization(作用是把神经网络中隐藏层归一为标准正态分布,加速收敛),具体操作是将每一行的每一个元素减去这行的均值, 再除以这行的标准差, 从而得到归一化后的数值。
Feedforward + Add & Norm
前馈网络也就是简单的两层线性映射再经过激活函数一下,比如

残差操作和层归一化同步骤
此时便构建出 Transformer中的一个encoder模块,经过1,2,3,4后得到的就是encode后的隐藏层表示,可以发现它的维度其实和输入是一致的!即:一个批次中句子数 X 一个句子的字数 X 字嵌入的维度。
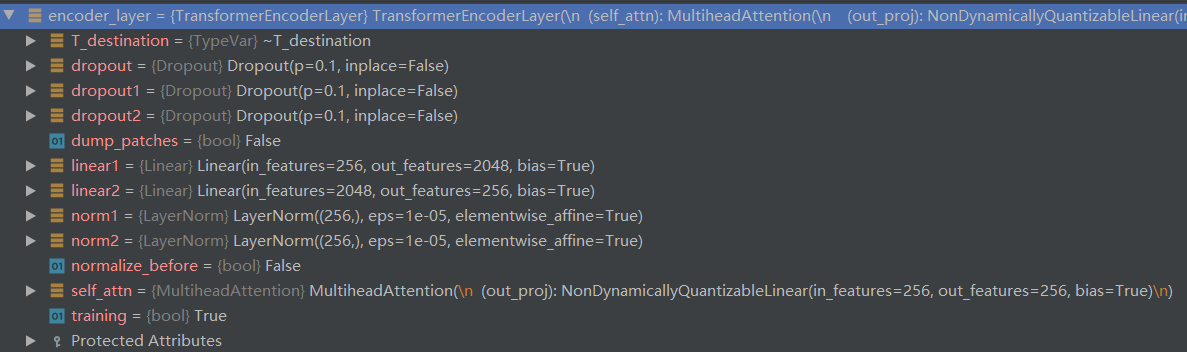
构建的单层编码器层整体代码如下:

构建后的单层编码器层相关参数如下:
最终构建多层编码器:
class TransformerEncoder(nn.Module):def __init__(self, encoder_layer, num_layers, norm=None):super().__init__()self.layers = _get_clones(encoder_layer, num_layers)#克隆多个encoder_layerself.num_layers = num_layersself.norm = normdef forward(self, src,mask: Optional[Tensor] = None,src_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None):output = srcfor layer in self.layers:output = layer(output, src_mask=mask,src_key_padding_mask=src_key_padding_mask, pos=pos)if self.norm is not None:output = self.norm(output)return output
克隆多个层代码
def _get_clones(module, N):return nn.ModuleList([copy.deepcopy(module) for i in range(N)])
解码器层的构造
与编码器不同,解码器中的最开始时需要使用多头注意力进行计算self-attention。
def __init__(self, d_model, nhead, dim_feedforward=2048, dropout=0.1,activation="relu", normalize_before=False):super().__init__()self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)self.multihead_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)# Implementation of Feedforward modelself.linear1 = nn.Linear(d_model, dim_feedforward)self.dropout = nn.Dropout(dropout)self.linear2 = nn.Linear(dim_feedforward, d_model)self.norm1 = nn.LayerNorm(d_model)self.norm2 = nn.LayerNorm(d_model)self.norm3 = nn.LayerNorm(d_model)self.dropout1 = nn.Dropout(dropout)self.dropout2 = nn.Dropout(dropout)self.dropout3 = nn.Dropout(dropout)self.activation = _get_activation_fn(activation)self.normalize_before = normalize_before
将上面初始化的组件连接起来:
def forward_post(self, tgt, memory,tgt_mask: Optional[Tensor] = None,memory_mask: Optional[Tensor] = None,tgt_key_padding_mask: Optional[Tensor] = None,memory_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None,query_pos: Optional[Tensor] = None):q = k = self.with_pos_embed(tgt, query_pos)#加入位置编码tgt2 = self.self_attn(q, k, value=tgt, attn_mask=tgt_mask,key_padding_mask=tgt_key_padding_mask)[0]#自注意力计算tgt = tgt + self.dropout1(tgt2)#残差连接tgt = self.norm1(tgt)#层归一化tgt2 = self.multihead_attn(query=self.with_pos_embed(tgt, query_pos),key=self.with_pos_embed(memory, pos),value=memory, attn_mask=memory_mask,key_padding_mask=memory_key_padding_mask)[0]tgt = tgt + self.dropout2(tgt2)#残次连接tgt = self.norm2(tgt)#层归一化tgt2 = self.linear2(self.dropout(self.activation(self.linear1(tgt))))#feed and forwardtgt = tgt + self.dropout3(tgt2)#残次连接tgt = self.norm3(tgt)#normal归一化return tgt
关于其多头注意力的构建与encoder是相同的,值得注意的是,detr的解码层是没有mask的。此外query的数量也是固定的。
最终,进行Transformer模型的组建:
def forward(self, src, mask, query_embed, pos_embed):# src: transformer输入,mask:图像掩码, query_embed:decoder预测输入embed, pos_embed:位置编码# flatten NxCxHxW to HWxNxCbs, c, h, w = src.shape# 获取encoder输入src = src.flatten(2).permute(2, 0, 1)# 获取位置编码pos_embed = pos_embed.flatten(2).permute(2, 0, 1)query_embed = query_embed.unsqueeze(1).repeat(1, bs, 1)# 获取输入掩码mask = mask.flatten(1)# torch.zeros_like:生成和括号内变量维度维度一致的全是零的内容。# tgt初始化,意义为初始化需要预测的目标。因为一开始不清楚需要什么样的目标,所以初始化为0,它会在decoder中# 不断被refine,但真正在学习的是query embedding,学习到的是整个数据集中目标物体的统计特征。而tgt在每一个epoch都会初始化。# tgt 也可以理解为上一层解码器的解码输出 shape=(100,N,256) 第一层的tgt=torch.zeros_like(query_embed) 为零矩阵,# query_pos 是可学习输出位置向量, 个人理解 解码器中的这个参数 全局共享 提供全局注意力 query_pos=(100,N,256)tgt = torch.zeros_like(query_embed)# 获取encoder输出memory = self.encoder(src, src_key_padding_mask=mask, pos=pos_embed)# 获取decoder输出,return_intermediate_dec为true时,得到decoder每一层的输出hs = self.decoder(tgt, memory, memory_key_padding_mask=mask,pos=pos_embed, query_pos=query_embed)return hs.transpose(1, 2), memory.permute(1, 2, 0).view(bs, c, h, w)
完成整体Transformer的构建后,我们将backbone与Transformer一起构建为DETR模型。
DETR模型构建
再次跳转到detr.py文件,开始DETR模型的构建
model = DETR(backbone,transformer,num_classes=num_classes,num_queries=args.num_queries,aux_loss=args.aux_loss,)
DETR组合
关于DETR模型初始化组件代码:
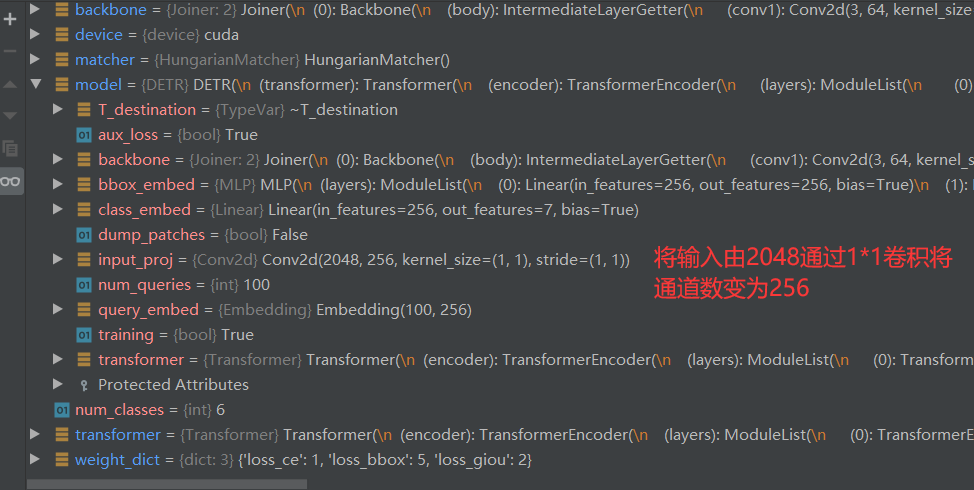
super().__init__()self.num_queries = num_queriesself.transformer = transformerhidden_dim = transformer.d_model # transformer输出channel# decoder后再接一个全连接,输出分类结果self.class_embed = nn.Linear(hidden_dim, num_classes + 1)# 利用MLP对框进行回归self.bbox_embed = MLP(hidden_dim, hidden_dim, 4, 3)# decoder预测输入,每帧预测num_queries个目标self.query_embed = nn.Embedding(num_queries, hidden_dim)# transformer输入前处理,backbone得到的是num_channels(2048)维度的输出,需要1*1的卷积降维到hidden_dimself.input_proj = nn.Conv2d(backbone.num_channels, hidden_dim, kernel_size=1)self.backbone = backboneself.aux_loss = aux_loss
再DETR中,其进行了其他组件的初始化,包含分类头(使用Linear实现,输出为7个维度num_class+1) 以及通过MLP实现回归给出预测框。输出4个值分别为x,y,w,h
至此,模型构建便完成了。
上一篇:算法强化每日一题--组队竞赛
下一篇:SkyWalking 日志收集