
Open3D 点云与模型ICP配准(Python,详细步骤版本二)
创始人
2025-05-29 08:09:49
文章目录
- 一、简介
- 二、实现代码
- 三、实现效果
- 参考资料
一、简介
这是一个很有趣的功能,在真正进入主题之前,让我们先回顾一下点云与点云ICP算法的过程,如下图所示:
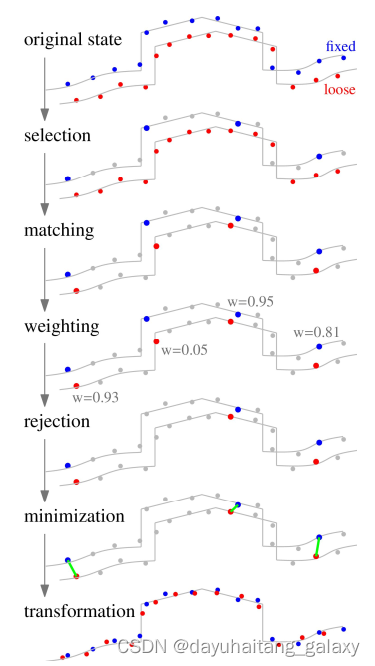
(1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。
(2)匹配特征点。通常是距离最近的两个点,当然这需要视评判的准则而定。
(3) 加权。根据点的匹配程度对找到的对应点进行加权。
(4)抑制匹配点。根据匹配点的匹配程度来对一些质量较差的点对进行抑制(剔除)。
(5)误差最小化。通过最小化距离的平方和来估计变换参数。
(6)点云变换。通过评估出的变换矩阵来转换源点云。
整个过程除了最后一步,剩余的步骤已有大量的文献进行过探索和研究,那么点云与模型的配准又有什么不同呢?主要的不同点就在于,匹配特征点的方式不同,点云与
相关内容
热门资讯
原创 印...
当地时间15日,美国总统川普宣布, “我与印尼备受尊敬的总统直接谈判,刚刚达成了一项对大家都很棒的协...
金盛贵金属:黄金投资有什么风险...
一、地缘冲突与政策博弈搅动黄金市场 2025 年的黄金市场正经历着 “过山车式” 震荡。世界黄金协会...
“要我就爱你哦!”科创债ETF...
首批科创债ETF今日重磅登陆沪深交易所! 作为资本市场“新生代宠儿”,这批产品从诞生就自带创新基因。...
原创 古...
各种事物在不断演变,历史长河中的交易方式和货币形式都经历了多次变化。从古代的“以物易物”,到如今的数...