
处理窄区路径规划的业务问题
创始人
2025-05-29 02:15:26
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
- 系列文章目录
- 前言
- 一、通过栅格地图的处理解决
- 二、使用bug绕障的方式走出窄区,或者结合边界图形参考bug算法沿边出来
- 三、使用维诺图计算连通路径
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对****做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
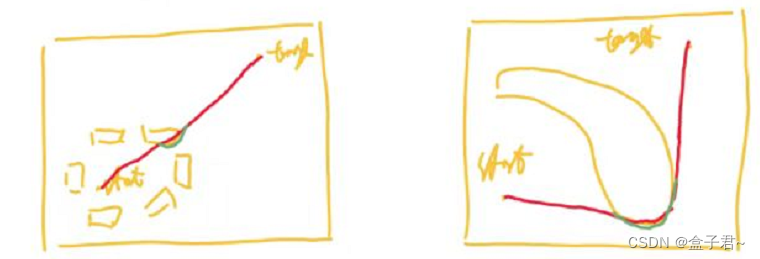
一、通过栅格地图的处理解决
–减少障碍物和边界膨胀系数,或者直接不膨胀来通过
–障碍物和边界内缩,通过图搜的方式搜索出路径(该路径存在碰撞的风险),对搜索出的路径进行后端优化适当变形(或者使用多边形限制)
.
.
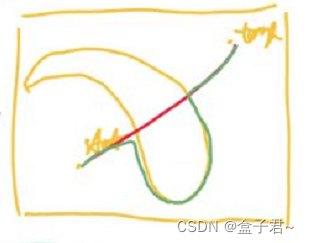
二、使用bug绕障的方式走出窄区,或者结合边界图形参考bug算法沿边出来
bug绕障的核心点
(1)如何确定绕障的进入点
(2)如何确定绕障的退出点
(3)如何进行沿边绕障(基于传感器距离使用控制来做?基于地图Astar来做?基于几何图形地图来做?)
(4)如何在起点和目标点不在障碍物边缘时,到导航绕障的进入点与如何从退出点到导航目标点(直线连接,动态astar?)
创新与业务点就是思考如何解决下面四个问题,还有解决这四个问题的顺序
.
.
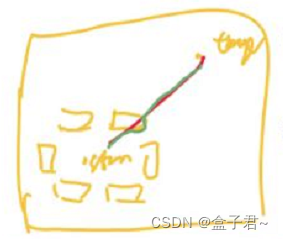
三、使用维诺图计算连通路径
原理和细粒度都要进行调参
.
.
相关内容
热门资讯
英语范文摘抄带题目【优秀6篇...
英语范文摘抄带题目 篇一:The Importance of Learning English英语范...
我的外教老师作文(推荐3篇)
我的外教老师作文 篇一我的外教老师是一个非常有才华和热情的人。他来自美国,有着丰富的教学经验和深厚的...
描写未来的英语作文(最新3篇...
描写未来的英语作文 篇一:A Glimpse into the FutureAs I close m...
关于人物的想象范文英语【优选...
Title: Imaginary Character - Article OneIn a world...
奥尔森姐妹英语作文(经典3篇...
奥尔森姐妹英语作文 篇一:Mary-Kate Olsen - A Fashion IconMary-...